2.2 Connexion de capteurs et d’actuateurs numériques sur Arduino et sur Raspberry Pi
Pour connecter des boutons, des DEL, d’autres capteurs et des actuateurs sur un microcontrôleur, premièrement on n’aura plus besoin d’une pile. C’est le microcontrôleur qui fournit le courant, mais il faut aussi apprendre comment les capteurs et les actuateurs doivent être connectés au microcontrôleur. Dans le cas d’Arduino, on doit utiliser les broches d’entrées-sorties numériques 0 à 13 pour connecter nos composants d’entrées et de sorties numériques, tandis que sur le Raspberry Pi, on doit utiliser les broches générales du port GPIO. Voir Figure 43 — Broches GPIO.
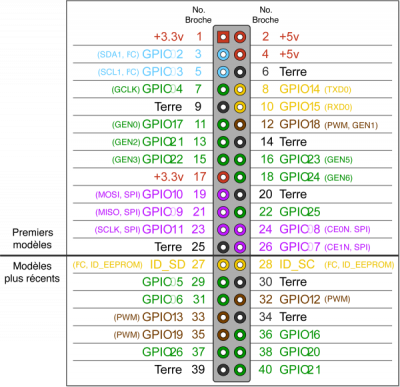
Figure 43 — Broches GPIO
2.2.1 Connexion des actuateurs
Dans le cas des actuateurs, c’est-à-dire des sorties pour notre microcontrôleur, on doit les connecter à une broche de terre (GND), puis à une résistance et à une broche d’entrées-sorties. C’est comme si on avait remplacé la pile d’un circuit simple par notre microcontrôleur. On pourra donc décider par programmation quand y envoyer du courant. Voir le schéma de connexion et l’exemple de la DEL aux figures suivantes : Figure 44 — Schéma de connexion des sorties, Figure 45 — Connexion d’un actuateur en sortie et Figure 46 — Exemple de la DEL.
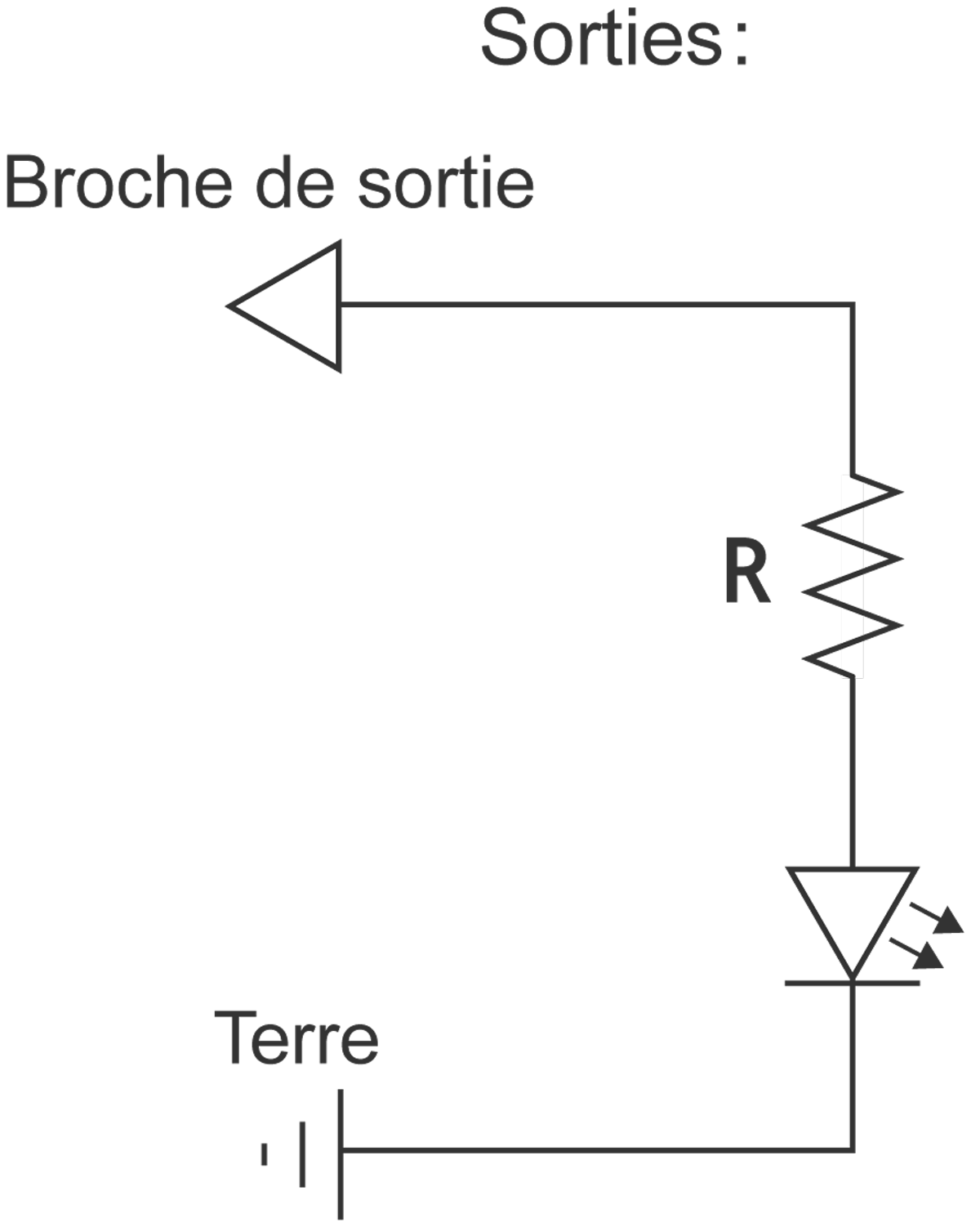
Figure 44 — Schéma de connexion des sorties
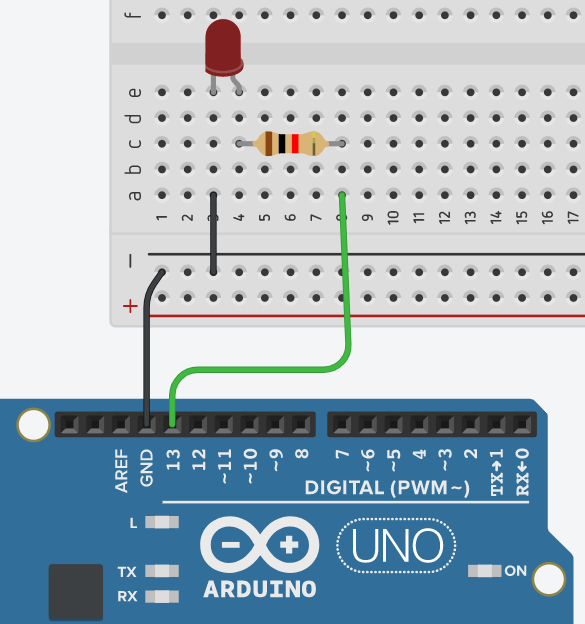
Figure 45 — Connexion d’un actuateur en sortie
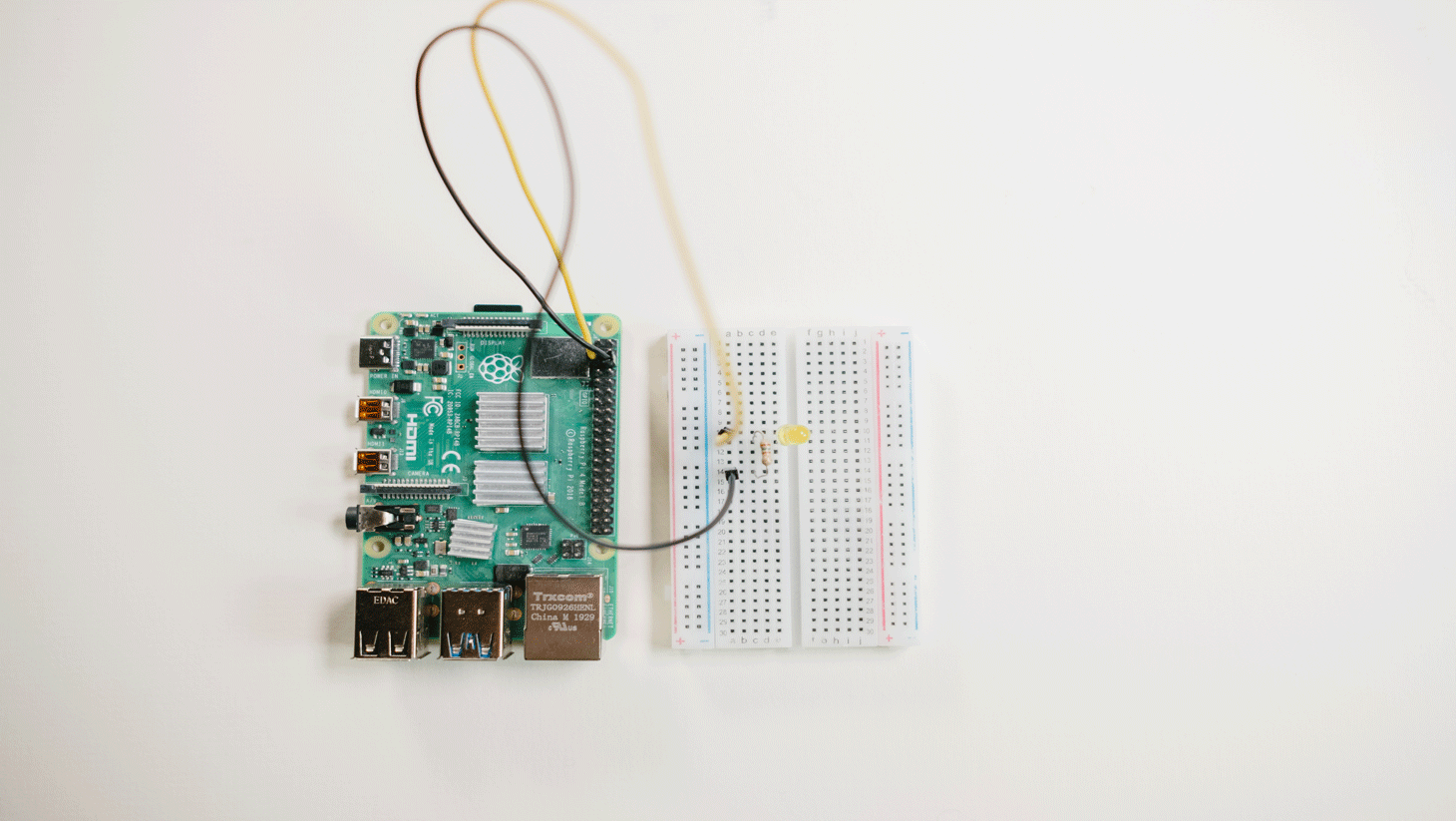
Figure 46 — Exemple de la DEL
Vidéo 13 : Connexion des actuateurs numériques dans le simulateur d’Arduino
Vidéo 14 : Connexion des actuateurs numériques avec Arduino
Vidéo 15 : Connexion des actuateurs numériques avec Raspberry Pi
2.2.2 Connexion des capteurs
Pour ce qui est des capteurs, comme on voudra les utiliser comme entrées avec notre microcontrôleur, il ne s’agit plus simplement de remplacer la pile par ces derniers, mais aussi d’ajouter une connexion supplémentaire pour la lecture de l’entrée numérique. On voudra porter attention à la broche de puissance utilisée, car sur Arduino il faut choisir celle de 5 V, tandis que sur Raspberry Pi, on doit plutôt utiliser celle qui fournit seulement 3,3 V puisque ce sont les voltages qu’on voudra lire comme entrée positive. Nous allons voir deux façons de connecter les entrées. Dans un premier cas, on veut que la valeur par défaut soit 0 et qu’elle change pour 1 quand le capteur est actionné. Dans ce cas, le capteur doit fermer le circuit et aussi contenir une résistance, tel qu’illustré aux figures suivantes qui présentent l’exemple d’un bouton-poussoir : Figure 47 — Schéma de connexion des entrées, Figure 48 — Connexion d’un capteur en entrée et Figure 49 — Exemple du bouton.
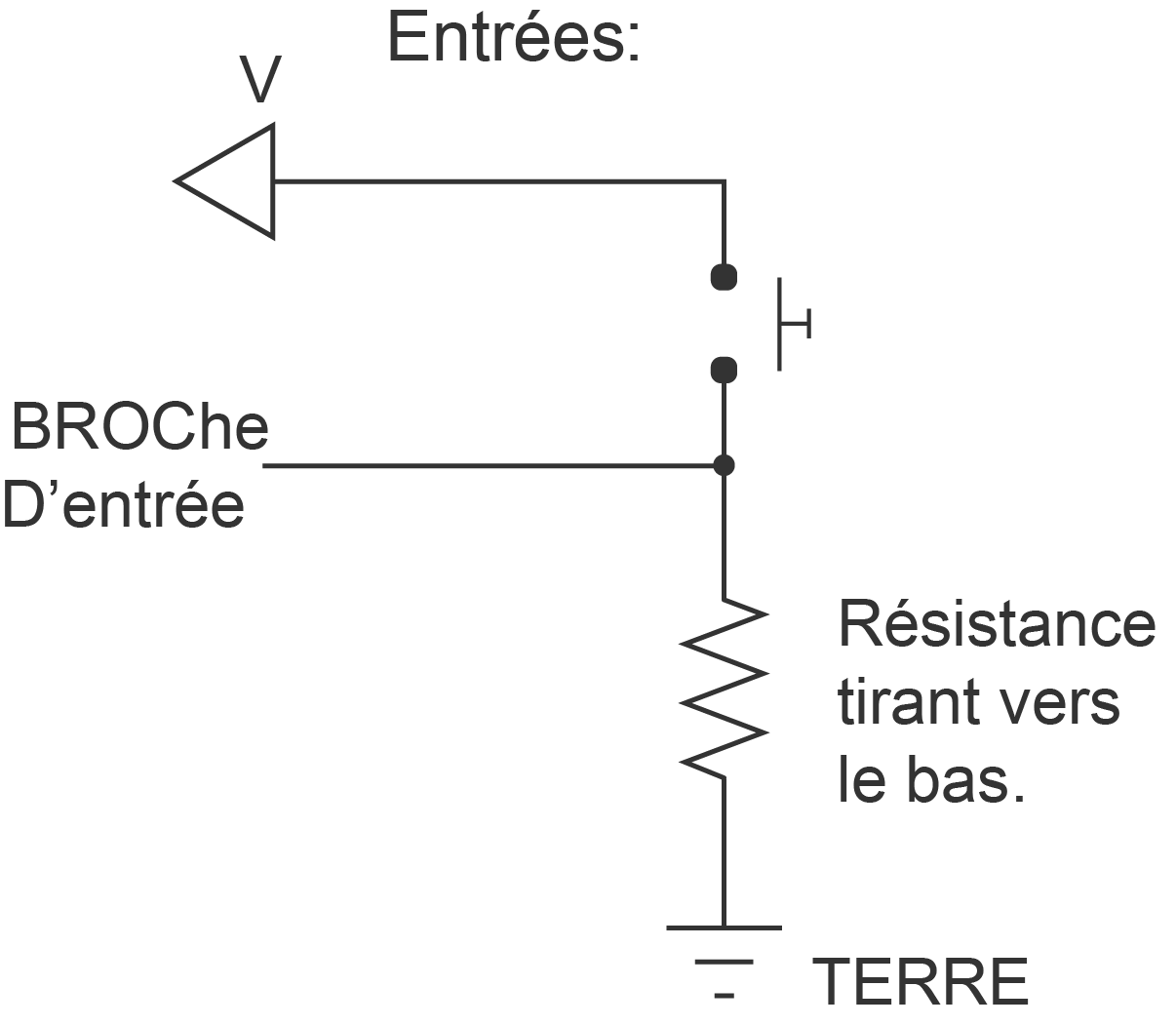
Figure 47 — Schéma de connexion des entrées
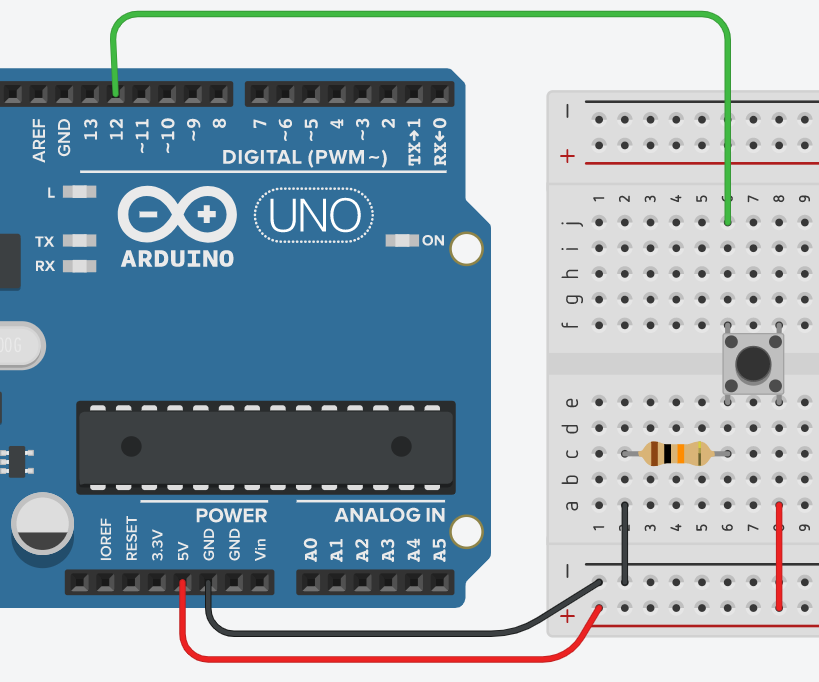
Figure 48 — Connexion d’un capteur en entrée
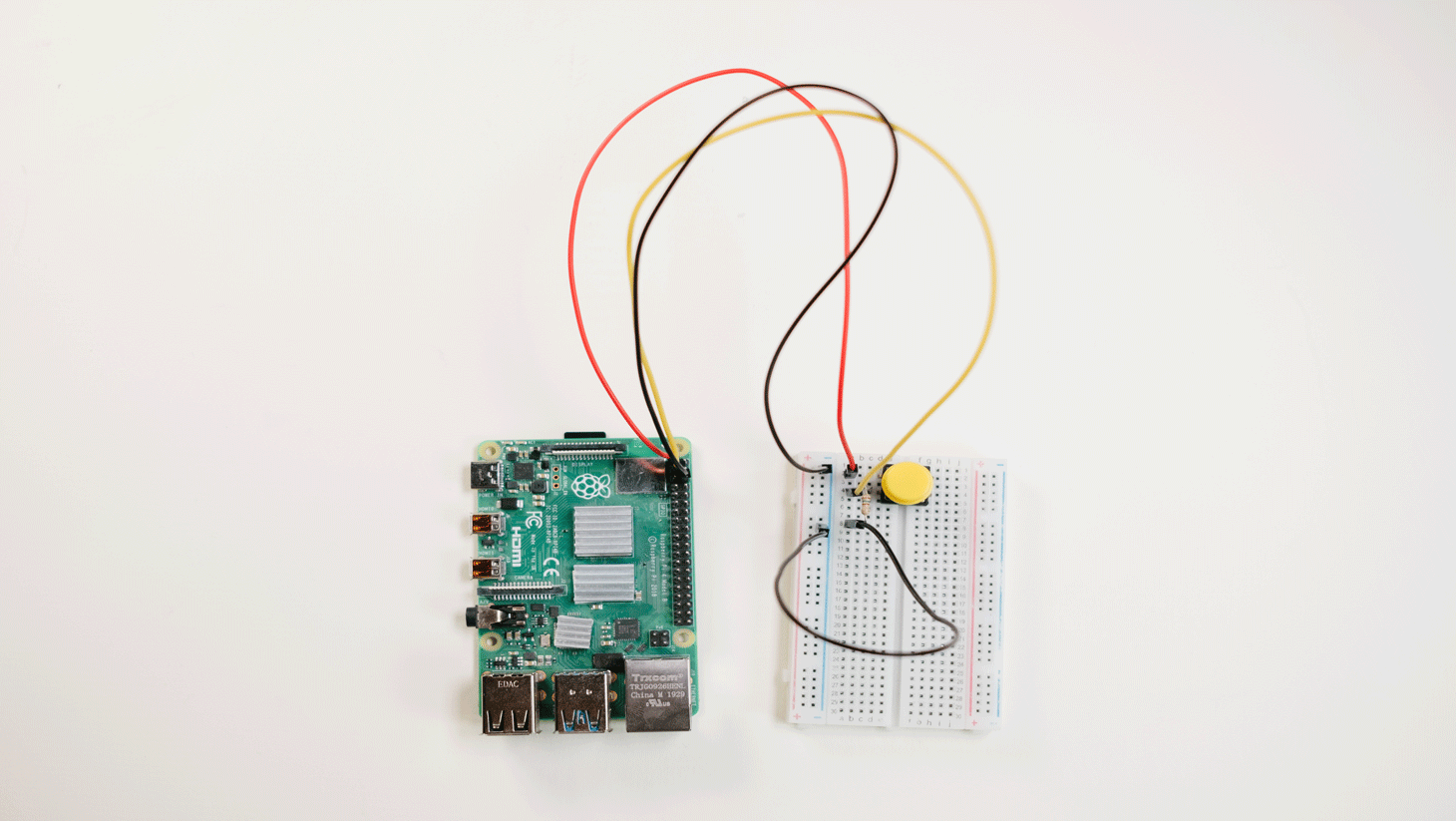
Figure 49 — Exemple du bouton
Vidéo 16 : Connexion des capteurs numériques avec Arduino
Vidéo 17 : Connexion des capteurs numériques avec Raspberry Pi
Dans l’autre cas, on veut que l’entrée soit 1 par défaut et que le capteur actionné permette de ramener l’entrée à 0. Pour cela, les microcontrôleurs contiennent déjà des circuits avec résistances pull-up qu’on activera par programmation, il suffit donc de connecter notre capteur entre la broche choisie comme entrée et la terre. Voir l’exemple aux figures suivantes : Figure 50 — Schéma de connexion des entrées tirées vers le haut, Figure 51 — Connexion d’un capteur en entrée tirée vers le haut et Figure 52 — Exemple d’entrée tirée vers le haut. Au repos, l’entrée est 1 et quand on appuie sur le bouton elle devient 0.
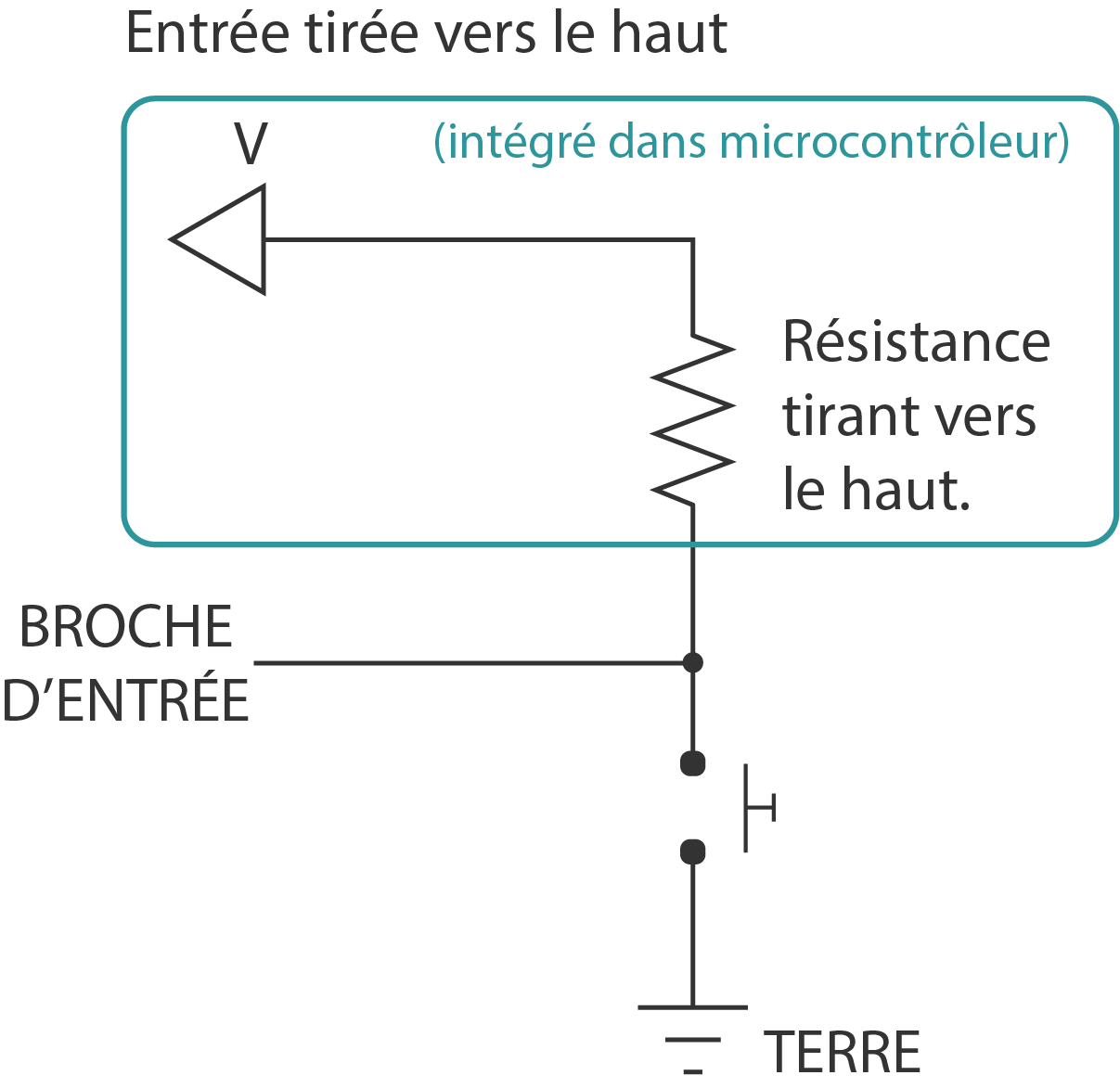
Figure 50 — Schéma de connexion des entrées tirées vers le haut (la partie encerclée est déjà dans le microcontrôleur)
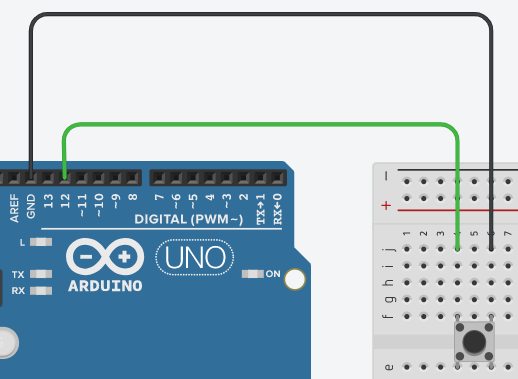
Figure 51 — Connexion d’un capteur en entrée tirée vers le haut
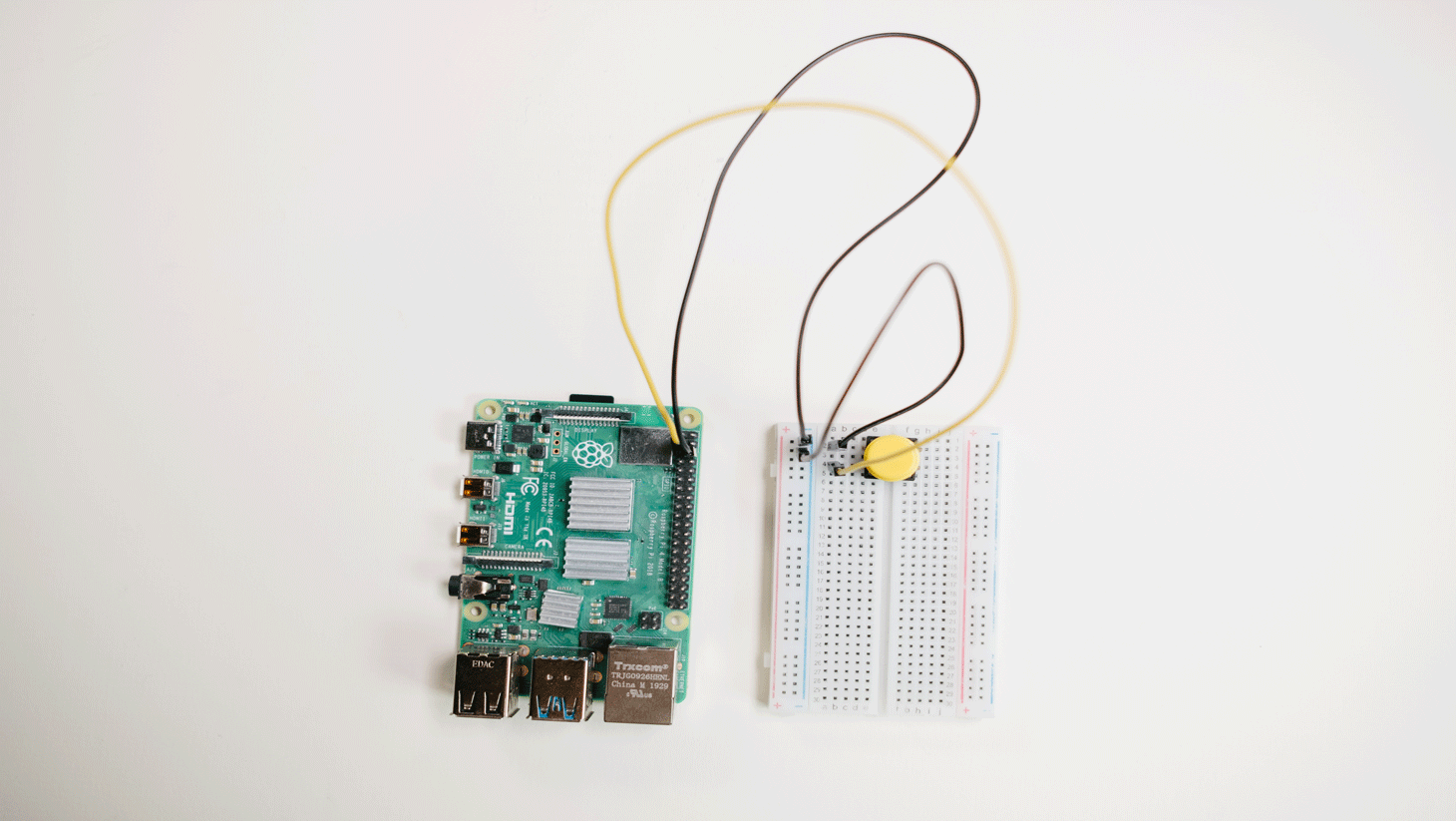
Figure 52 — Exemple d’entrée tirée vers le haut
Vidéo 18 : Connexion d’entrées tirées vers le haut avec Arduino
Vidéo 19 : Connexion d’entrées tirées vers le haut avec Raspberry Pi
Par ailleurs, d’autres capteurs numériques, par exemple les interrupteurs, ont trois broches. Pour ceux-ci, on connectera la broche du milieu à une broche d’entrée du microcontrôleur et pour les deux autres, une va à la terre et une va à une broche de puissance. Selon les capteurs, on doit vérifier s’il faut ajouter une résistance entre le capteur et la broche de puissance avant de faire la connexion. L’entrée lue sera donc 1 quand l’interrupteur ferme le circuit entre la broche de puissance et la broche d’entrée, tandis que ce sera 0 quand il ferme le circuit plutôt entre l’entrée et la terre.
Finalement, notons que si on connecte plusieurs capteurs et actuateurs sur le microcontrôleur, on utilisera généralement des circuits parallèles et non en série.
| Connexion des actuateurs | Connexion des capteurs | Entrée tirée vers le haut | Connexion des interrupteurs |
|---|---|---|---|
| Connecter une borne (positive s’il y a lieu) à une résistance, puis la résistance à une broche de sortie. Connecter l’autre borne à la terre. | Connecter une borne à une broche d’entrée. Connecter cette même borne à une résistance, puis la résistance à la terre. Connecter l’autre borne à une broche de puissance, 5V sur Arduino ou 3.3V sur Raspberry Pi. | Connecter une borne à une broche d’entrée. Connecter l’autre broche à la terre. | Connecter la broche du milieu à une broche d’entrée, une des deux autres broches à la terre et la dernière à la puissance (avec résistance s’il y a lieu). |