4.1 Connexion des capteurs et des actuateurs analogiques
La connexion des actuateurs analogiques à un microcontrôleur se fait presque de la même façon que pour les actuateurs numériques. Par contre, ils doivent être connectés sur des broches spécifiques puisqu’ils fonctionnent avec des variations de voltage, plutôt que seulement du courant ou non. C’est principalement leur programmation qui sera différente. En effet, les microcontrôleurs comme Arduino et Raspberry Pi ne produisent pas de sorties analogiques, mais ils peuvent en simuler par programmation par une technique de modulation de largeur d’impulsion (MLI ou PWM pour Pulse-Width Modulation en anglais). Sur Arduino, il faudra choisir une des broches qui permet de le faire. Elles sont identifiées par un tilde (~), soit les broches 3, 5, 6, 9, 10, et 11, ou autres selon la version de l’Arduino. Sur le Raspberri Pi, les seules broches utilisables avec des MLI sont les broches 12, 32, 33 et 35, voir Figure 43 — Broches GPIO.
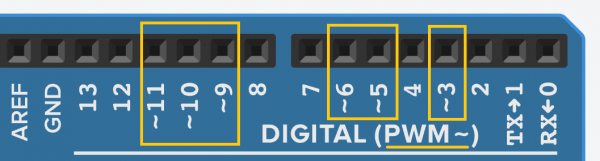
Figure 66 — Broches de sorties analogiques sur Arduino
Vidéo 35 : Connexion des actuateurs analogiques sur Arduino
Vidéo 36 : Connexion des actuateurs analogiques sur Raspberry Pi
Pour ce qui est des capteurs analogiques, avec Arduino, on utilisera une des broches d’entrées analogiques, identifiées A0 à A5, plutôt qu’une broche d’entrée numérique.
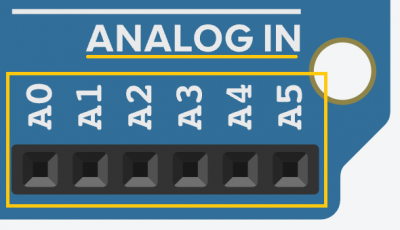
Figure 67 — Broches d’entrées analogiques sur Arduino
Vidéo 37 : Connexion des capteurs analogiques sur Arduino
Le Raspberry Pi, quant à lui, n’a pas ce type de broches. On doit donc utiliser un convertisseur analogique à numérique pour traiter correctement des données de capteurs analogiques. Voir la section 4.4 Utilisation d’un convertisseur analogique à numérique.